SmartProfilometer - Smart Calibration of Rotating profilometer
High resolution 3D point clouds by means of rotating profilometer
DESCRIPTION
In current industrial practice, 3D object reconstruction is often performed using profilometers and linear translation stages. While this approach is simple and sometimes effective, it presents notable limitations. Linear motion restricts the system’s ability to capture all the necessary data, especially when dealing with complex geometries, leading to a significant loss of detail in the reconstructed model.
A robotic manipulator can scan an object from multiple viewpoins. However, the overall positioning accuracy of such robots is often in the range of millimeters—or even tens of millimeters—across the entire working area. In contrast, the wrist rotation axis tends to be significantly more stable and repeatable.
For the above reasons we developed a new application mounting a profilometer on a spindle axis or on the end effector of a robotic manipulator, allowing the sensor to rotate. This rotational setup enables an accurate and repeatable observation of the object from multiple viewpoints, capturing detailed, complete and accurate dataset.
However, this method introduces a key challenge: the need for extremely accurate calibration of the sensor’s pose relative to the axis of rotation in 5 degrees of freedom. Even small angular misalignments of the order of 0.1° causes visible distortions in the point cloud. These errors compromise the precision of the 3D reconstruction, particularly for small features or complex geometries, where accuracy is paramount.
To overcome this, our methodology we developed a special procedure and a proprietary algorithm, the SmartProfilometer, that consists in the following steps/elements:
- Acquisition of profile data from a plane from limited number of viewpoins;
- Background and outlier removal to clean the dataset;
- Estimation of the extrinsic parameters that define the sensor’s position and orientation with respect to the rotational axis across its 5 degrees of freedom.
The calibration makes it possible to accurately place the acquired points within a global reference frame, enabling high-fidelity 3D reconstructions also using standard robotic manipulators.
ACCURACY
To verify the metrological performances of our approach we used a high precision translating stage and a reference sphere.
In this example we achieved a deviation of approximately 0.02 mm, consistent with the nominal specifications of typical laser triangulation profilometers.
CASE-STUDIES
Having at disposal a high resolution/accuracy point cloud and a manipulator many applications can be imagined and put in place.
Hereafter just some examples:
- 3D shape verification: missing details with the nominal CAD
- Planar bodies deformation acquisition
The highly detailed acquisition achieved with our approach enables the matching with the nominal CAD of a part and the verification of production deviations, missing parts, the recognition of the specific item and so on.
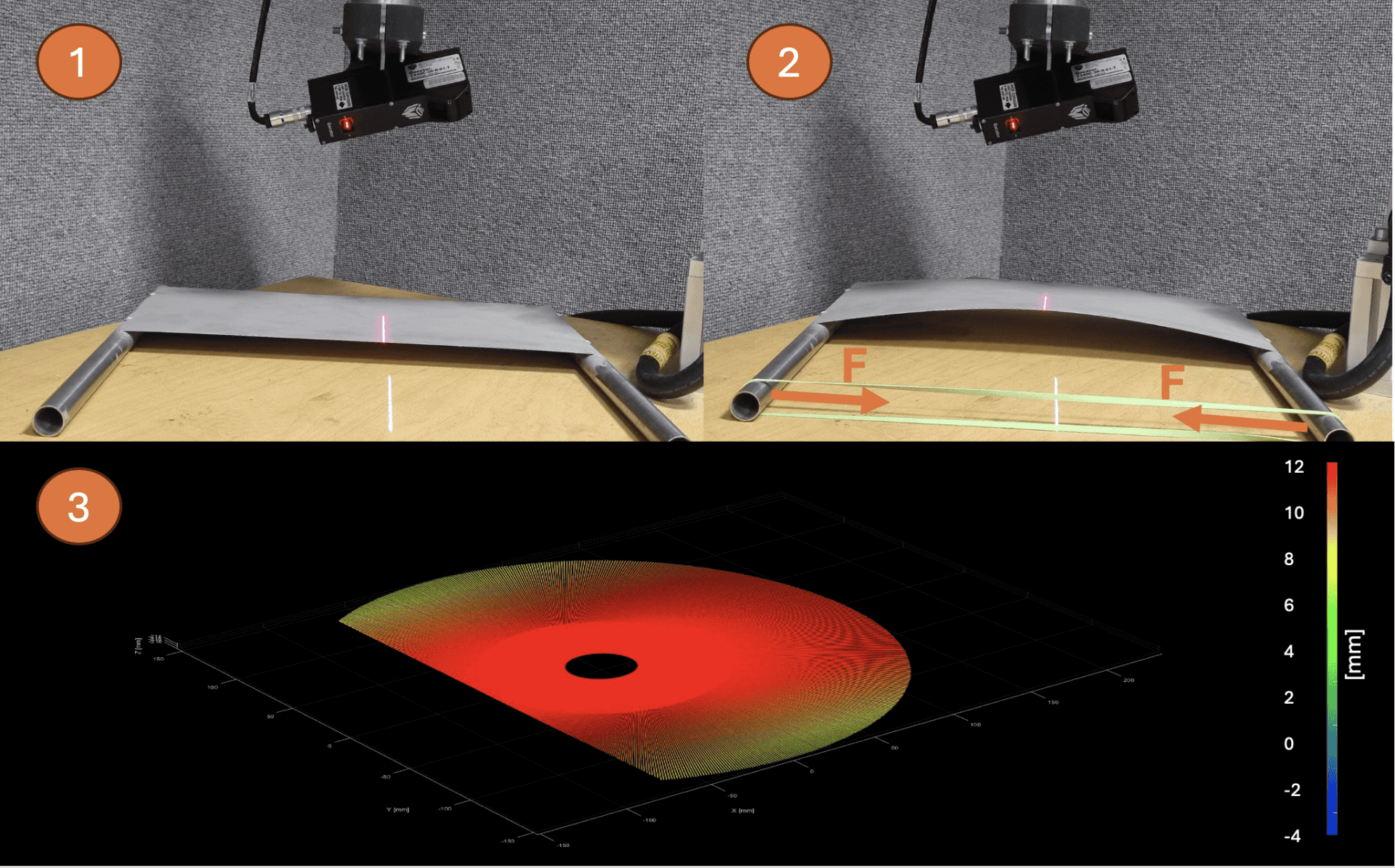
In structural testing our approach enables the measurement of a body shape before and after the application of torques/forces and the mapping of relative deformations.