SmartProfilometer - Taratura Smart di profilometri rotanti
Nuvole di punti 3D ad alta risoluzione mediante profilometro rotante
DESCRIZIONE
Nella pratica industriale attuale, la ricostruzione 3D degli oggetti viene spesso eseguita utilizzando profilometri e sistemi di traslazione lineare . Sebbene questo approccio sia semplice e talvolta efficace, presenta notevoli limitazioni. Il movimento lineare limita infatti la capacità del sistema di acquisire tutti i dati necessari, soprattutto in presenza di geometrie complesse, causando una significativa perdita di dettagli nel modello ricostruito.
Un manipolatore robotico può scansionare un oggetto da molteplici punti di vista. Tuttavia, l'accuratezza complessiva di posizionamento di questi robot è spesso dell'ordine dei millimetri — o addirittura di decine di millimetri — su tutto il loro campo di lavoro. Al contrario, l'asse di rotazione del polso risulta essere significativamente più stabile e ripetibile.
Per questi motivi abbiamo sviluppato una nuova applicazione montando un profilometro su un asse di rotazione o sull'estremità operativa di un manipolatore robotico, consentendo al sensore di ruotare. Questa configurazione rotazionale permette un'osservazione accurata e ripetibile dell'oggetto da molteplici punti di vista, catturando un set di dati dettagliato, completo e preciso.
Tuttavia, questo metodo introduce una sfida fondamentale: la necessità di una calibrazione estremamente accurata della posizione del sensore rispetto all'asse di rotazione nei suoi 5 gradi di libertà. Anche piccoli disallineamenti angolari dell'ordine di 0,1° causano distorsioni visibili nella nuvola di punti. Questi errori compromettono la precisione della ricostruzione 3D, in particolare per caratteristiche di piccole dimensioni o geometrie complesse, dove l'
Per superare questo ostacolo, la nostra metodologia ha sviluppato una procedura speciale e un algoritmo proprietario, lo SmartProfilometer, che consiste nei seguenti passaggi/elementi:
- Acquisizione di dati di profilo da un piano da un numero limitato di punti di vista;
- Background and outlier removal per pulire il dataset;
- Stima dei parametri estrinseci che definiscono la posizione e l'orientamento del sensore rispetto all'asse di rotazione nei suoi 5 gradi di libertà.
La calibrazione consente di posizionare accuratamente i punti acquisiti all'interno di un sistema di riferimento globale, permettendo ricostruzioni 3D ad alta fedeltà anche utilizzando manipolatori robotici standard.
ACCURATEZZA
Per verificare le prestazioni metrologiche del nostro approccio, abbiamo utilizzato uno stadio di traslazione ad alta precisione e una sfera di riferimento.
In questo esempio abbiamo ottenuto una deviazione di circa 0,02 mm, coerente con le specifiche nominali dei tipici profilometri a triangolazione laser.
CASI-STUDIO
Avere a disposizione una nuvola di punti ad alta risoluzione/accuratezza e un manipolatore apre la strada a molteplici applicazioni che possono essere immaginate e implementate.
Ecco alcuni esempi:
- Verifica della forma 3D: dettagli mancanti rispetto al CAD nominale.
- Acquisizione della deformazione di corpi piani.
L'acquisizione altamente dettagliata ottenuta con il nostro approccio consente il confronto con il CAD nominale di una parte e la verifica delle deviazioni di produzione, delle parti mancanti, del riconoscimento dell'oggetto specifico e così via.
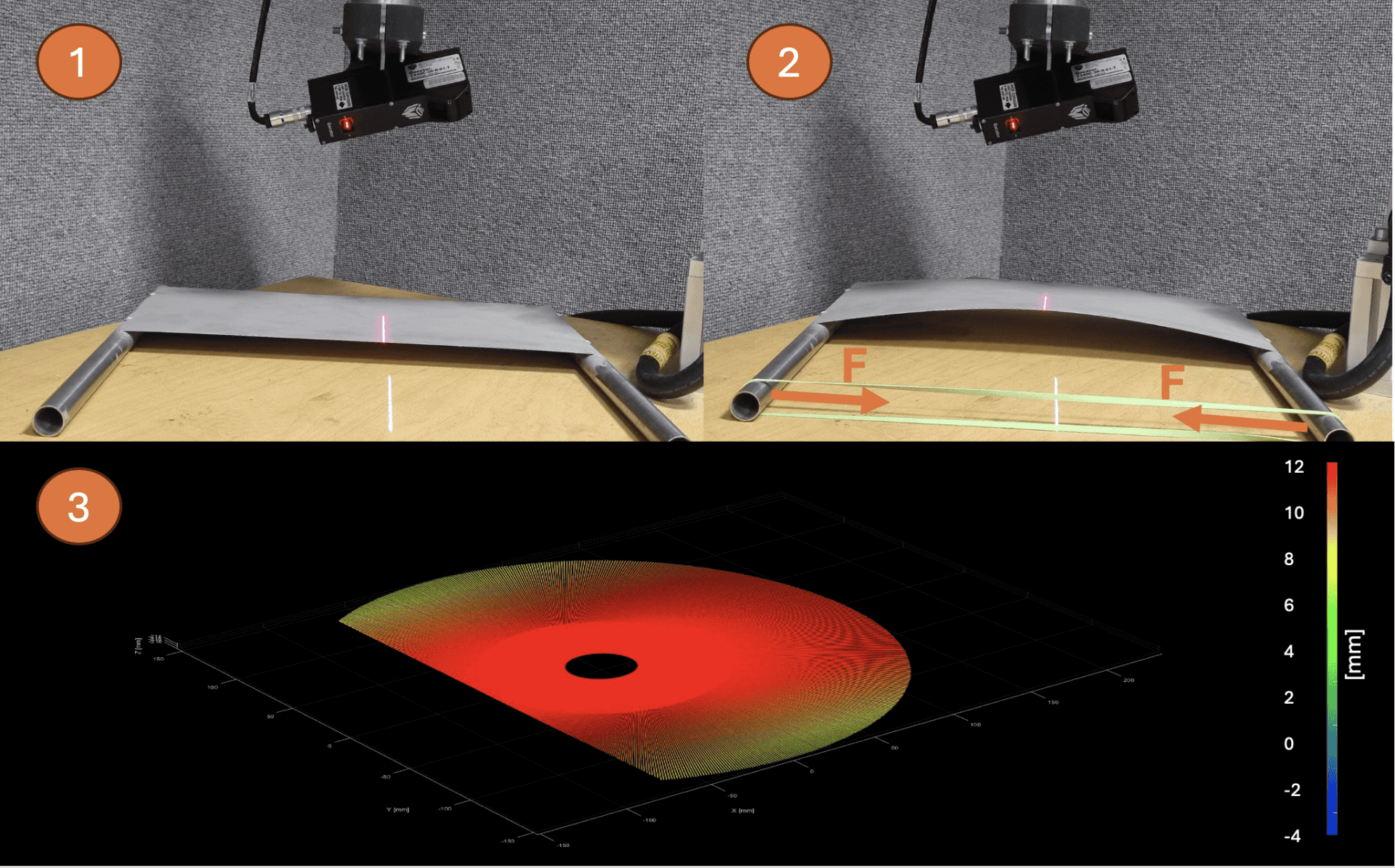
Nel collaudo strutturale, il nostro approccio consente la misurazione della forma di un corpo prima e dopo l'applicazione di coppie/forze e la mappatura delle deformazioni relative.